 Robot prototype on track
Robot prototype on track Robot prototype on track | Side Profile
Robot prototype on track | Side Profile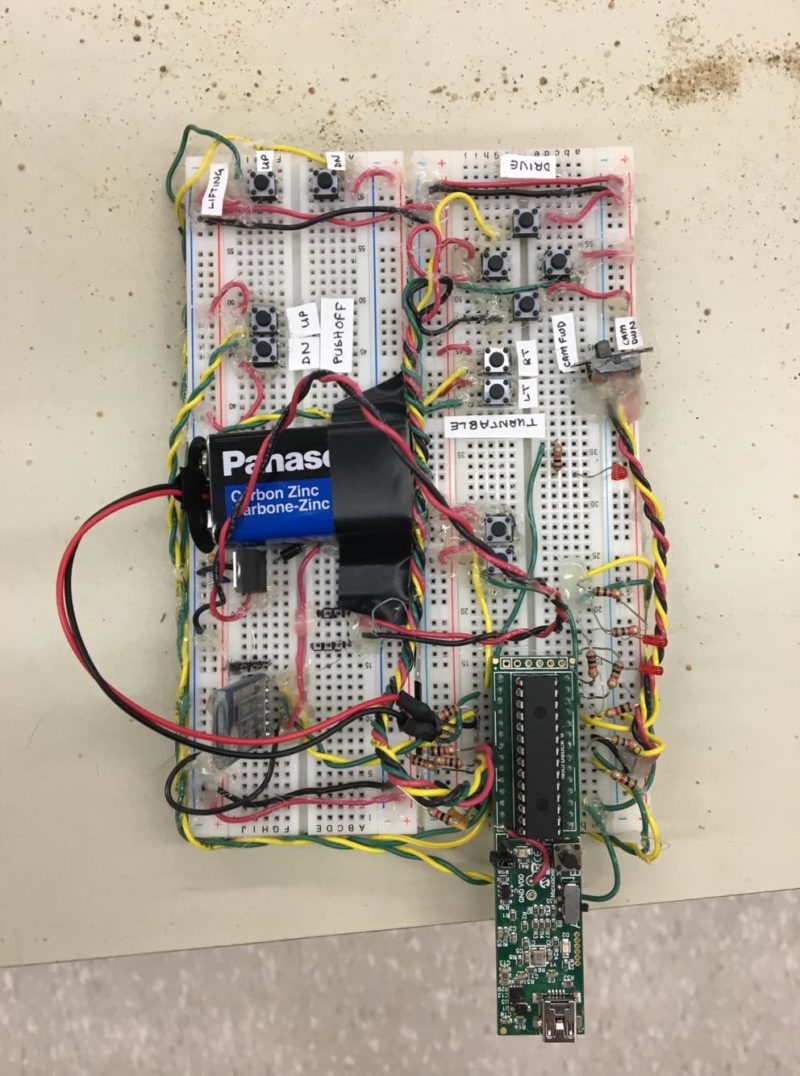 Bluetooth Controller
Bluetooth Controller 3D Print of GRIP-002 | Comparisons of Rev A. and Rev B.
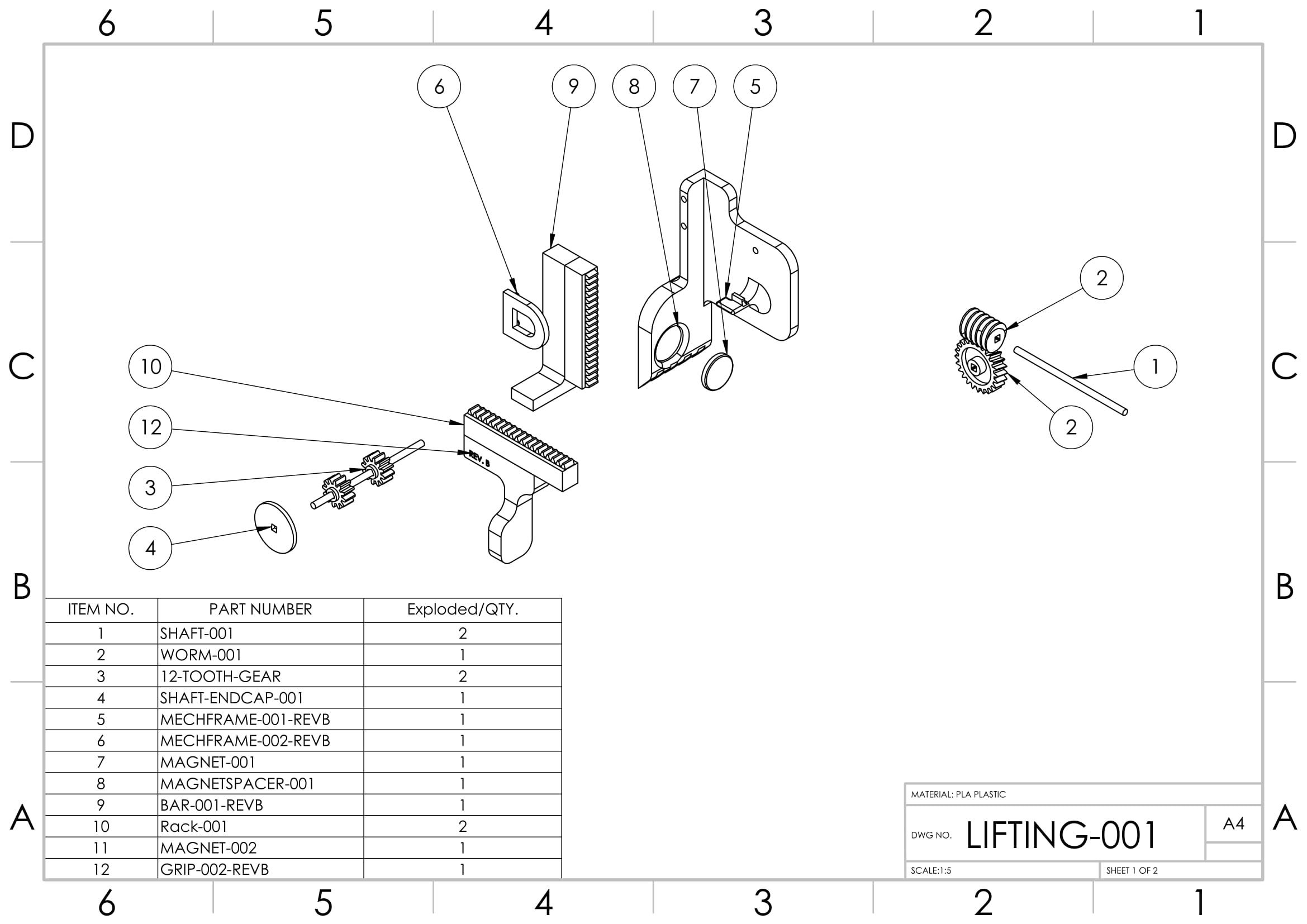
3D Print of GRIP-002 | Comparisons of Rev A. and Rev B.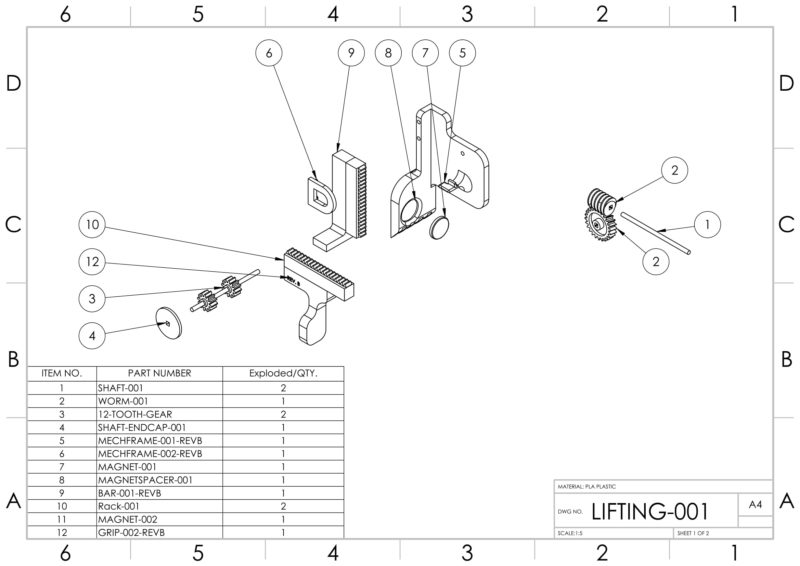 Exploded View Drawing | LIFTING-001-1
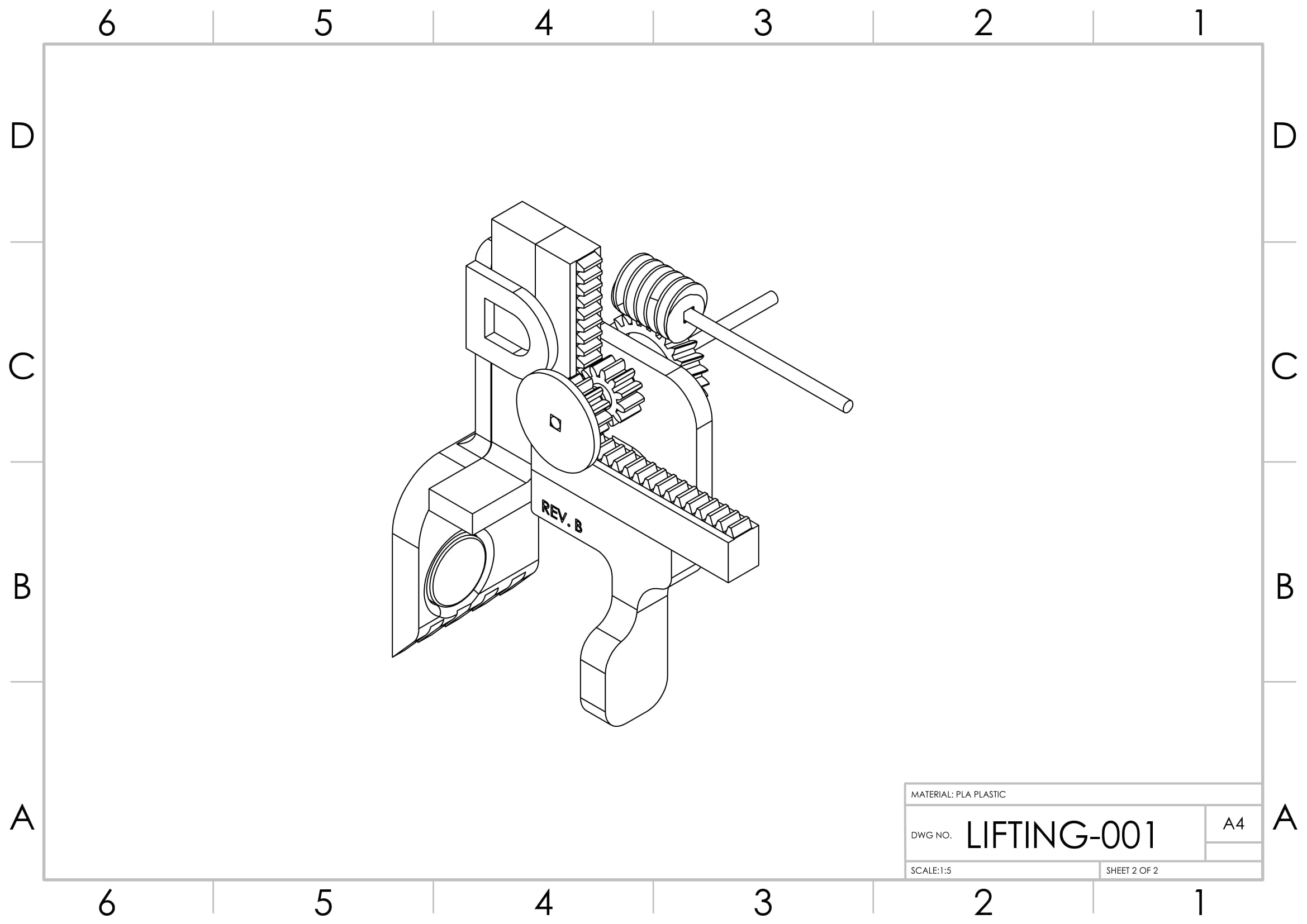
Exploded View Drawing | LIFTING-001-1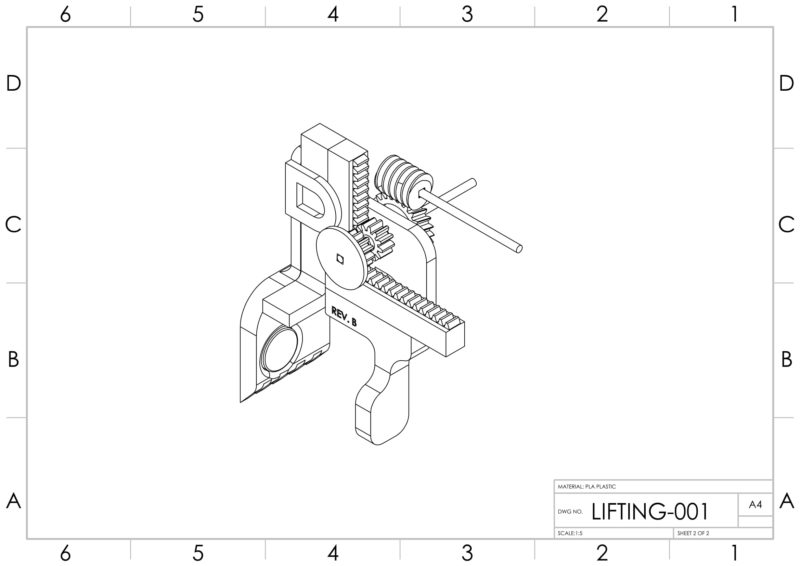 Assembly View Drawing | LIFTING-001-1
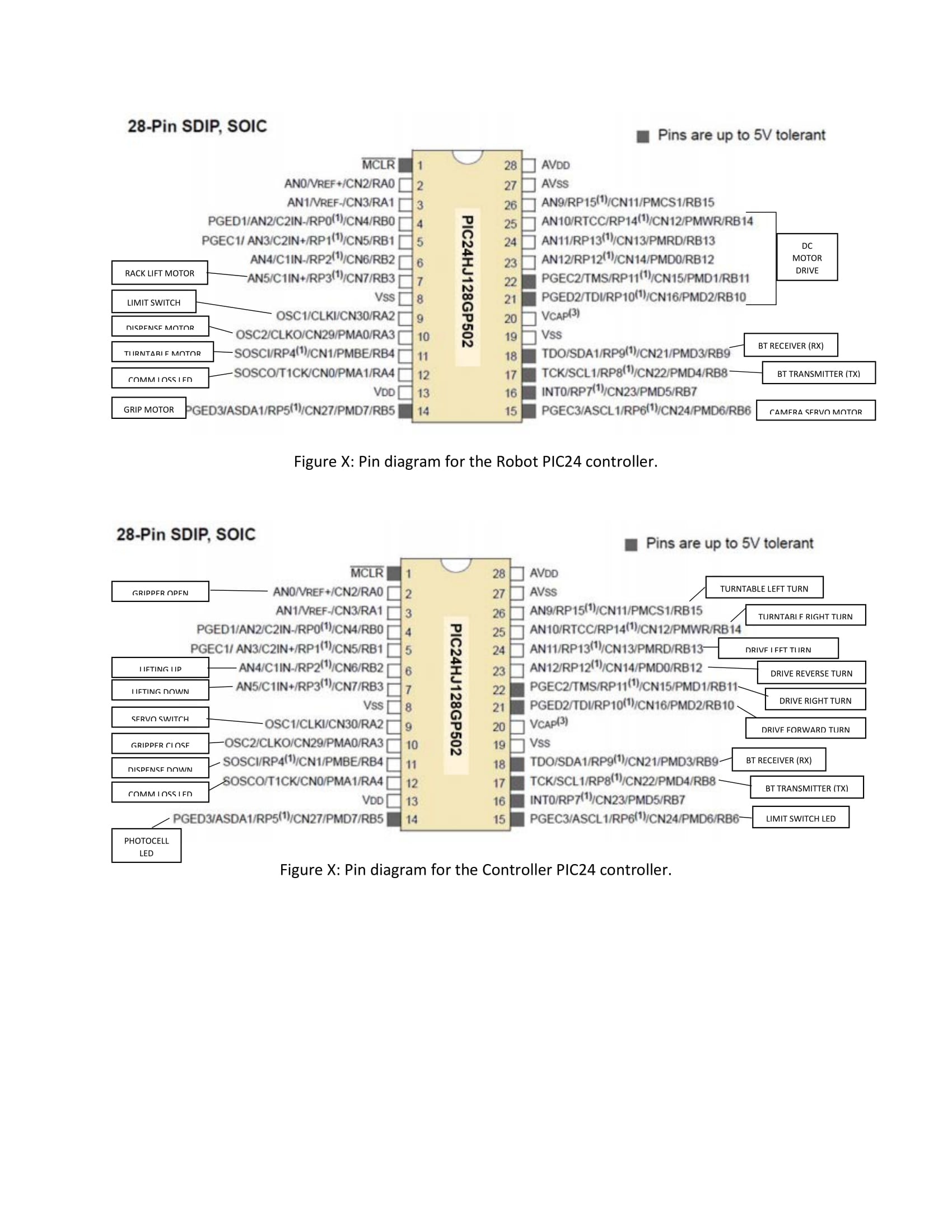
Assembly View Drawing | LIFTING-001-1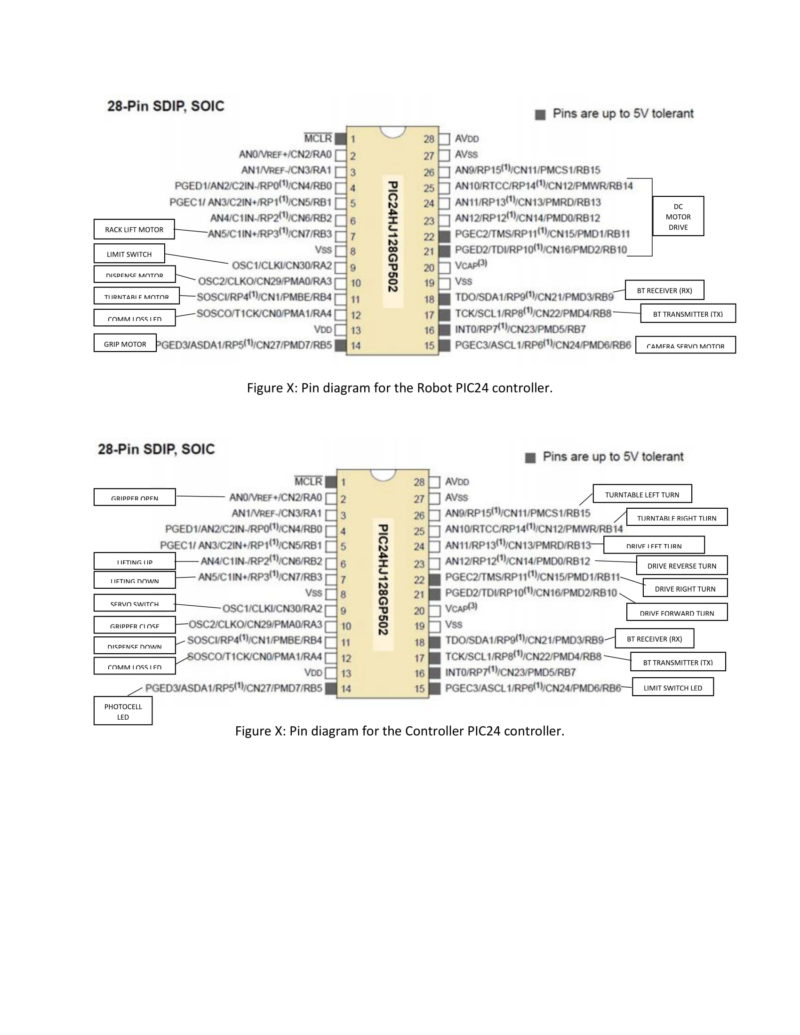 PIC Micro Pin Layout
PIC Micro Pin Layout


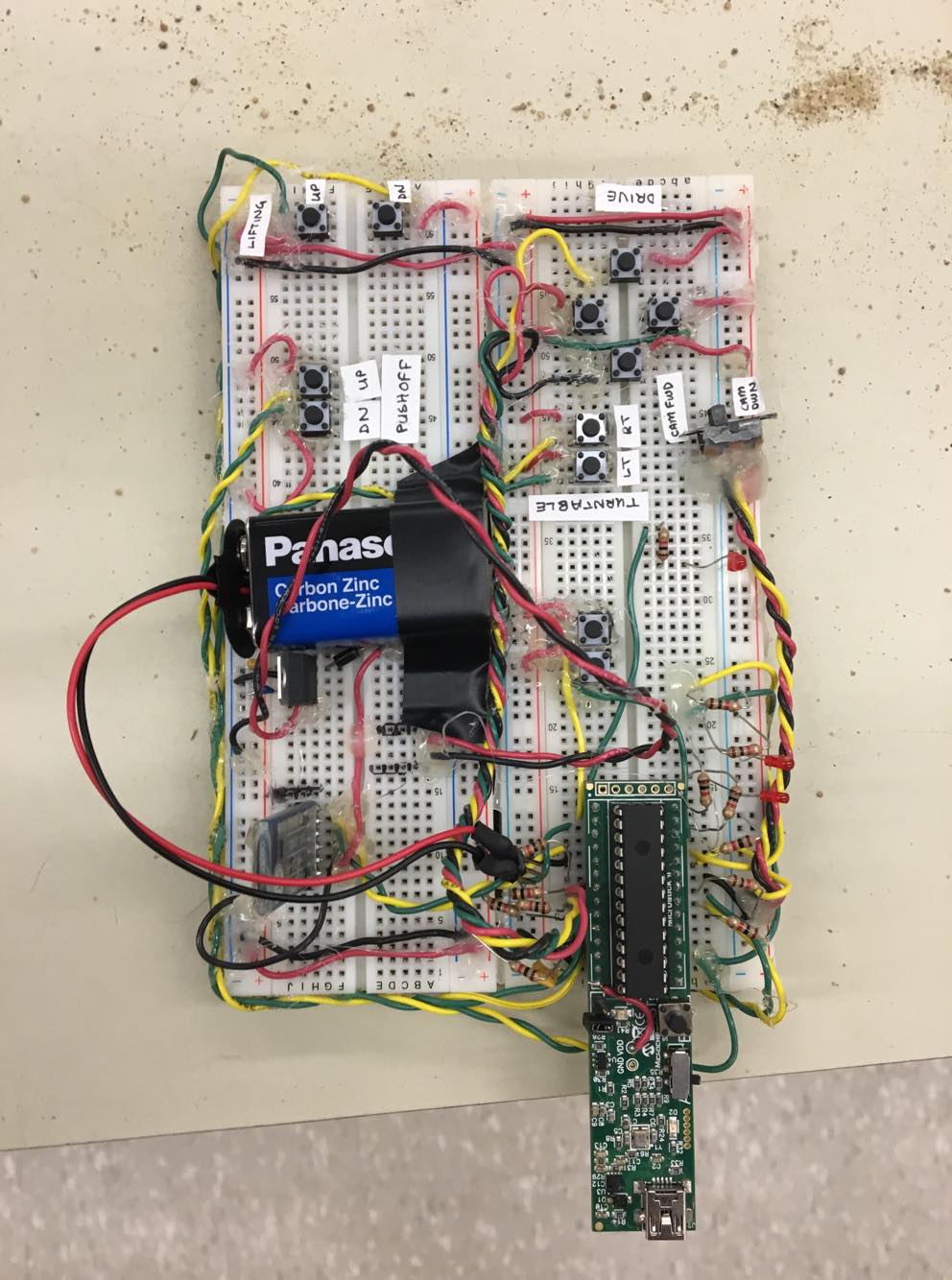

As part of an academic course, designed a prototype of a semi-autonomous robot to extract radioactive material from a debris zone. The objective was to traverse a simulated mining site, search for and extract items of interest, and deposit them outside the site in a safe zone.
A wireless comm system was developed using a PIC24H microcontroller and a Bluetooth HC-05 couple. Drive system and chassis were built using a combination of VEX system components and 3D printed components. Any custom components were designed on SolidWorks.
Control logic was kept simple, with a focus on reliability. The final prototype functioned well, successfully meeting engineering requirements.
Share your thoughts